Currently working on autonomous driving in heavily vegetated environments as part of Robomechanics Lab. My goal is to become a full-stack roboticist and a product engineer, developing 'fun' techy products for 'people'. With passion for lifelong learning and a commitment to give back to the community, I strive to be resourceful and make the world a better place.
Master's: Carnegie Mellon University | Mechanical Engineering - Perception and Mechatronics
Bachelor's: University of Wisconsin - Madison | Mechanical Engineering; Computer Science

An all-inclusive, immersive Star Wars project that takes users from building the lightsaber, choosing a crystal, to duel practice against Darth Vader. Focuses on embedded coding, mechatronic components, and sensor fusion implemented from scratch without any libraries.
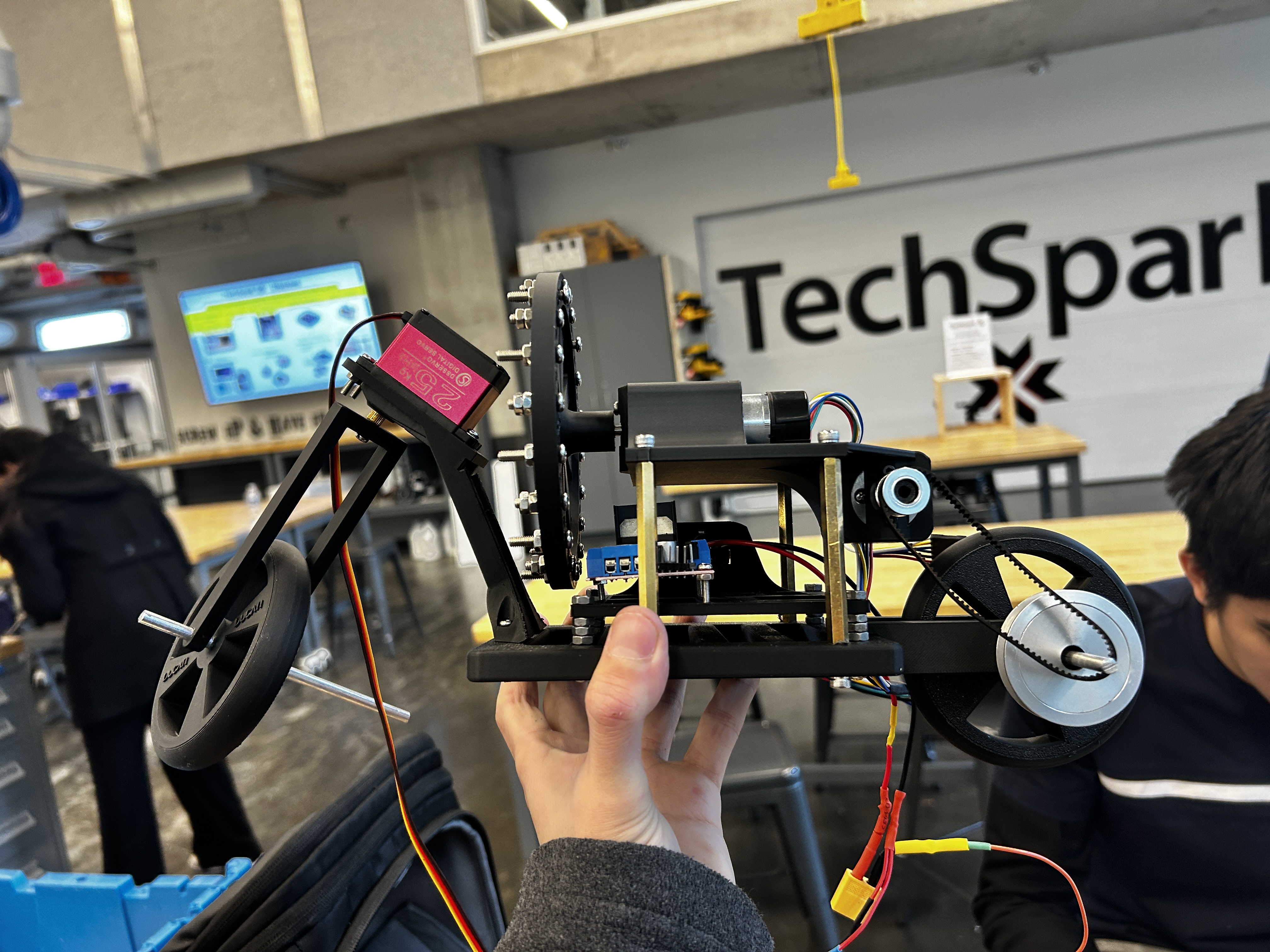
E-Ducati-On is an educational robotics platform designed to teach students about robotics, programming, and controls. Most self-balancing bike systems are either open source and passive, or expensive and closed source. Our team built a Ducati based educational platform that is not only exciting and capable of performing stunts, but also features a visual interface and adjustable control parameters, enabling students to learn control theory through hands-on experience.

An innovative concept combining pest management with renewable energy generation.
Robotic navigation where instead of treating all obstacles as untraversable, their cost are estimated for an initial path. Upon collision, the cost of the obstacle is updated and the path is recomputed.
Autonomous environmental monitoring robot for forested areas using LiDAR, camera sensor fusion, and adaptive density drive.
Traditional CMU line tracing robot competition entry with autonomous navigation and precision control systems.
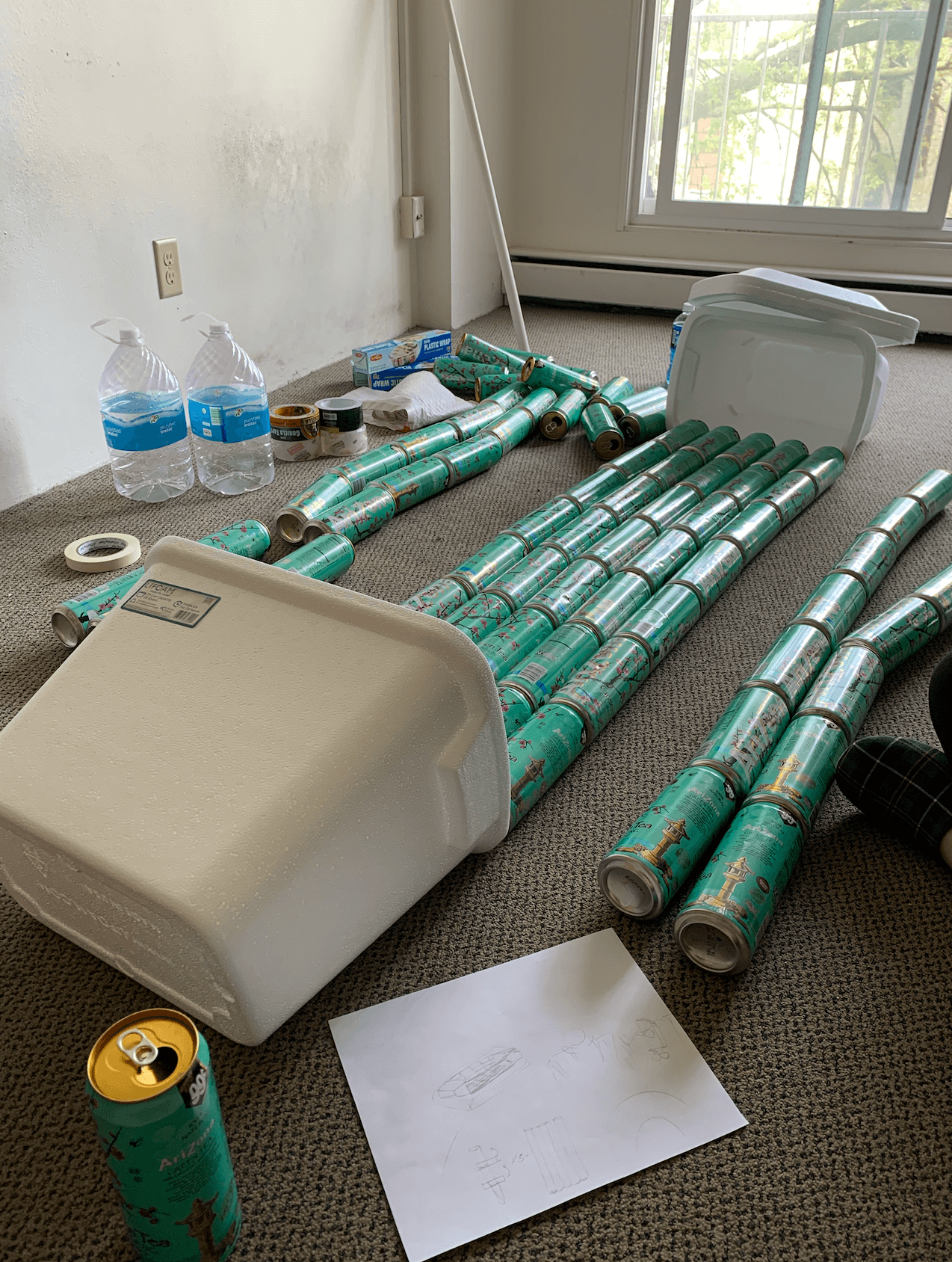
Underwater drone project built during CMU's Build 18 competition for recreational, environmental, and safety applications.
Biomimetic underwater robot inspired by fish tail propulsion, designed for efficient aquatic locomotion and maneuverability.
Competitive robotics team competing in RoboMaster, focusing on autonomous navigation and precision targeting systems.
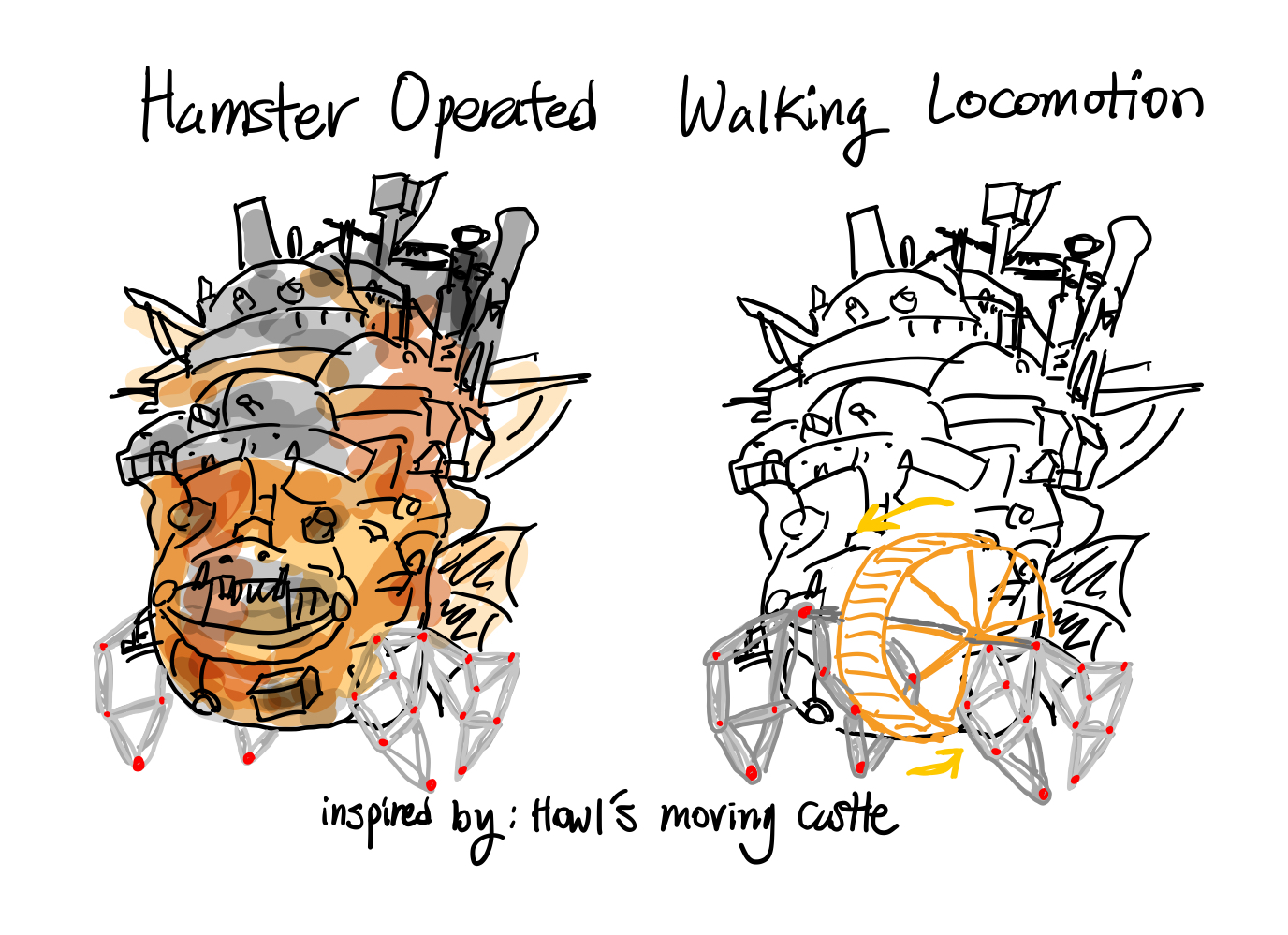
Self-balancing rimless wheel robot investigating fundamental properties of human walk cycle with enhanced stability using PID control.
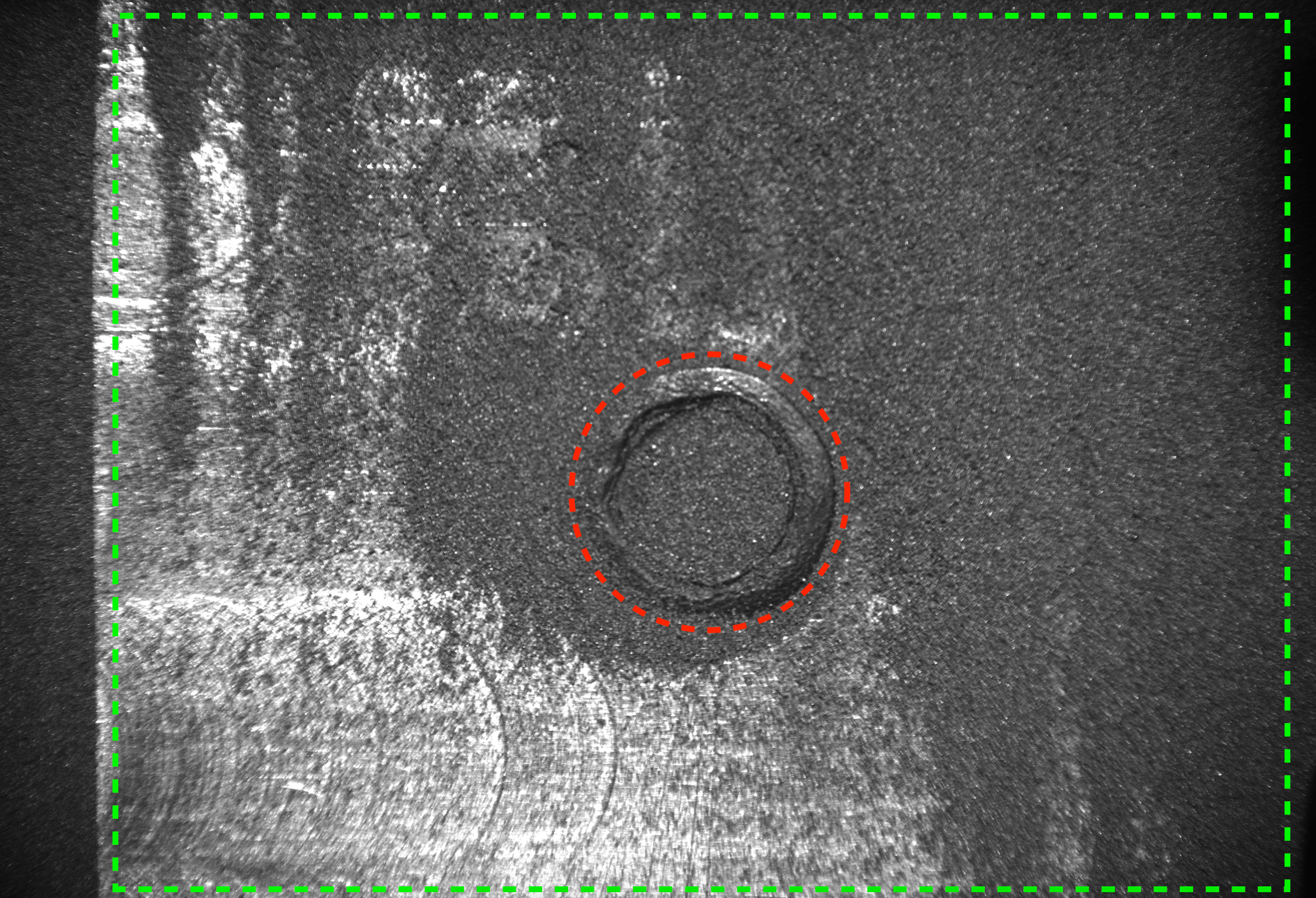
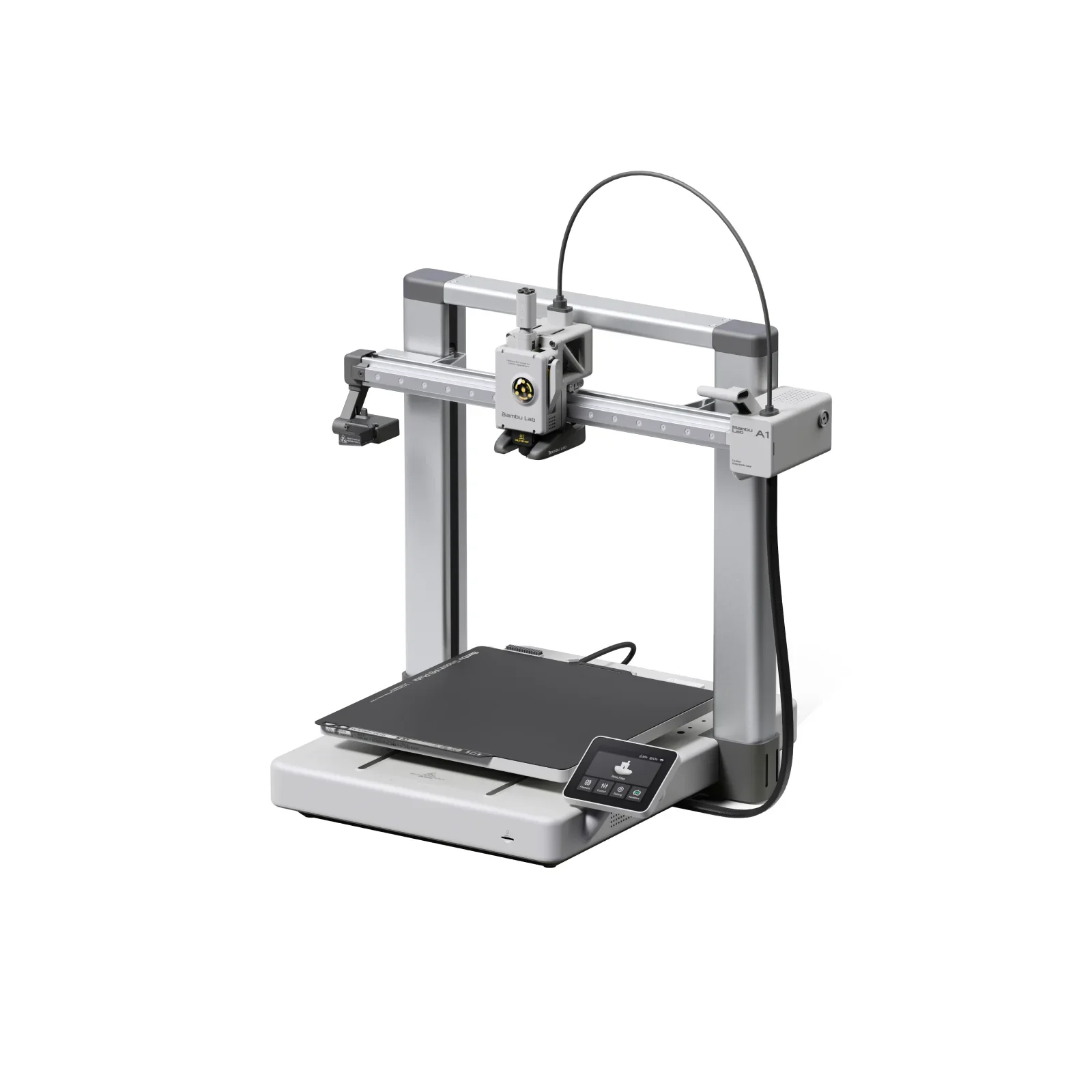
Powder bed fusion manufacturing system created for ML analysis on powder spread conditions and quality control.
Open-source quadruped robot platform designed for educational purposes and affordable robotics research.
Versatile robotic platform designed for multiple applications, featuring modular design and adaptive control systems.
Advanced robotic system designed for autonomous exploration and navigation in challenging environments.